|
STM32-I2C总线通信内容概要 I2C总线通信原理 三轴加速度传感器mpu6050介绍 I2C通信实例
I2C总线通信原理
内容概要: I2C总线简介 I2C总线协议 I2C总线读写操作 STM32F0-I2C控制器特性
I2C总线简介: I2C总线介绍:I2C(Inter-Integrated Circuit)总线(也称IIC或I2C)是由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备,是微电子通信控制领域广泛采用的一种总线标准。它是同步通信的一种特殊形式,具有接口线少,控制方式简单,期间封装形式少,通信速率高等优点。 I2C总线特征: 两条总线线路:一条串行数据SDA,一条串行时钟线SCL来完成数据的传输及外围器件的扩展 I2C总线上的每一个设备都可以作为主设备或者从设备,而且每一个设备都会对应一个唯一的地址 I2C总线数据传输速率在标准模式下可达100kbit/s,快速模式下可达400kbit/s,高速模式下 可达3.4Mbit/s。一般通过I2C总线接口可编程时钟来实现传输速率的调整,同时也跟所接的上拉电阻的阻值有关。 I2C总线上的主设备与从设备之间以字节(8位)为单位进行单双工的数据传输。
I2C总线物理·拓扑结构:

I2C 总线在物理连接上分别由SDA(串行数据线)和SCL(串行时钟线)及上拉电阻组成。通信原理是通过对SCL和SDA线高低电平时序的控制,来产生I2C总线协议所需要的信号进行数据的传递。在总线空闲状态时,这两根线一般被上面所接的上拉电阻拉高,保持着高电平。
I2C总线协议:

I2C协议规定: 总线上数据的传输必须以一个起始信号作为开始条件,以一个结束信号作为传输的停止条件。起始和结束信号总是由主设备产生。总线在空闲状态时,SCL和SDA都保持着高电平。
起始信号:当SCL为高电平而SDA由高到低的跳变,表示产生一个起始条件 结束信号:当SCL为高电平而SDA由低到高的跳变,表示产生一个停止条件
数据传输:
数据传输以字节为单位 , 主设备在SCL线上产生每个时钟脉冲的过程中将在SDA线上传输一个数据位,数据在时钟的高电平被采样,一个字节按数据位从高位到低位的顺序进行传输 主设备在传输有效数据之前 要先指定从设备的地址,一般为7位,然后再发生数据传输的方向位, 0表示主设备向从设备写数据,1表示主设备向从设备读数据
应答信号: 接收数据的器件在接收到 8bit 数据后,向发送数据的器件发出低电平的应答信号,表示已收到数据。这个信号可以是主控器件发出,也可以是从动器件发出。总之,由接收数据的器件发出。
I2C总线读写操作: 主设备往从设备写数据:

主设备读从设备数据:

注:当主设备不想接收从设备的数据时,主设备产生一个非应答信号,从设备接收到这个信号之后就停止发送数据。
主设备读从设备的某个寄存器:

STM32F0-I2C控制器特性:
软件模拟I2C时序:由于直接控制 GPIO 引脚电平产生通讯时序时,需要由 CPU 控制每个时刻的引脚状态,所以称之为“软件模拟协议”方式。
硬件控制产生I2C时序:STM32 的 I2C 片上外设专门负责实现 I2C 通讯协议,只要配置好该外设,它就会自动根据协议要求产生通讯信号,收发数据并缓存起来,CPU只要检测该外设的状态和访问数据寄存器,就能完成数据收发。这种由硬件外设处理 I2C协议的方式减轻了 CPU 的工作,且使软件设计更加简单。
STM32F0-I2C控制器特性:

I2C的主要特点: ● I2C总线规范 rev03 兼容性: - 从机模式和主机模式 - 多主机功能 - 标准模式(高达 100kHz ) - 快速模式(高达 400kHz ) - 超快速模式(高达 1 MHz ) - 7 位和 10 位地址模式 - 软件复位
● 1 字节缓冲带 DMA 功能
STM32F0-I2C控制:

注:STM32F0XX中,PB6或者PB8任意一个可以作为I2C1的SCL,PB7或者PB9任意一个可作为I2C的SDA
I2C的主要特点: 64KB片上闪存的F0带2个I2C:I2C1和I2C2 32KB片上闪存的F0只带1个I2C:I2C1 I2C2比I2C1所支持的功能少些,不具备 对SMBus的硬件支持 20mA的驱动能力 模块双时钟域以及从停止模式唤醒
三轴加速度传感器mpu6050介绍
内容概要: MPU6050简介 MPU6050特性参数 MPU6050寄存器介绍 MPU6050简介: MPU-6050 是全球首例 6轴运动处理传感器。它集成了 3 轴 MEMS 陀螺仪,3 轴 MEMS 加速度计,以及一个可扩展的数字运动处理器 DMP(Digital Motion Processor),可用I2C 接口连接一个第三方的数字传感器,比如磁力计。扩展之后还可以通过其 I2C 输出一个 9 轴的信号。MPU-6050 也可以通过其 I2C 接口连接非惯性的数字传感器,比如压力传感器。

三轴加速度测量:

注意:加速度测量计反应的加速向量与当前的受力方向是相反的,如上图,受力方向向左,但是加速度的向量方向为右 陀螺仪: 陀螺仪,是用来测量角速度的,单位为度每秒(deg/s)

一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向。Mpu6050有3个陀螺仪,可测X,Y,Z方向的角速度值
MPU6050的特性参数:

注:加速度最高分辨率算法:因为加速度是由16位的寄存器存放,故 精度 = 加速度测量范围/(2的16次方) ,分辨率 = 1/精度 ,所以当加速测量范围越小,精度越好,分辨率越高。由上图表可知加速度测量范围是 正负2g的时候,由最高分辨率 (2的16次方)/(2-(-2)) = 16384 LSB/g。
MPU6050的寄存器介绍: POWER MANAGEMENT电源管理寄存器:

SLEEP 该位置 1 , MPU-60X0 进入睡眠模式。 CLKSEL置 0,可选择使用MPU-60X0 默认的内部8M振荡器作为时钟源
典型设置: I2C_WriteReg(MPU6050_RA_PWR_MGMT_1, 0x00);//解除休眠状态 SAMPLE RATE DIVIDER 采样频率分频器:

采样频率= 陀螺仪输出频率/ ( 1+SMPLRT_DIV )
当 DLPF s is disabled ( 0 DLPF_CFG=0 r or 7 7 7 7) ) ,陀螺输出频率 =8kHz ;
典型设置: I2C_WriteReg(MPU6050_RA_SMPLRT_DIV , 0x07); //陀螺仪采样率,1KHz
CONFIGURATION 低通滤波配置寄存器:

该寄存器配置外部引脚采样,陀螺仪和加速度计的数字低通滤波器。
典型设置:
I2C_WriteReg(MPU6050_RA_CONFIG , 0x06); //低通滤波频率,典型值:0x06(带宽5KHz) GYROSCOPE CONFIGURATION 陀螺仪配置寄存器:


该寄存器是用来触发陀螺仪自检和配置陀螺仪的满量程范围。
典型设置:
I2C_WriteReg(MPU6050_RA_GYRO_CONFIG, 0x18); //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s) ACCELEROMETER CONFIGURATION 加速度配置寄存器:
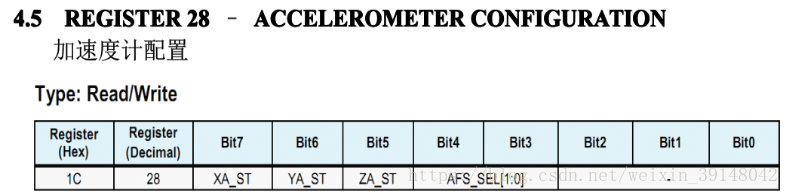

该寄存器是用来触发加速度计自检和配置加速度计的满量程范围。
典型设置: I2C_WriteReg(MPU6050_RA_ACCEL_CONFIG , 0x00); //配置加速度传感器工作在 2G 模式,不自检 读取X, Y, Z 三轴加速度的值:


读取X, Y, Z 三轴陀螺仪的值:


读取温度值:

摄氏度的温度可以用寄存器的置这么计算:
Temperature n in s degrees C = (TEMP_OUT Register e Value as a signed quantity)/340 + 36.53
MPU6050的设备地址:

MPU6050电气原理图:

注:R4未接,AD0直接接到电源上,因此设备地址为110 1001既0x69
I2C通信实例
利用STM32-I2C总线配置MPU6050,并读取三轴加速度的原始数据 过程如下:



将自己编写的mpu6050.h文件(主要是对mpu6050的一些寄存器地址 宏定义)拷贝到该工程对应的目录下:

新建文件mpu6050.c,然后添加到工程中:




- mpu6050.h文件内容如下:
-
- #ifndef __MPU6050_H
- #define __MPU6050_H
-
- /* Includes ------------------------------------------------------------------*/
-
-
- //****************************************
- // MPU6050 IIC测试程序
- // 功能: 显示加速度计和陀螺仪的16位原始数据
- //****************************************
- #include <math.h> //IAR library
- #include <stdio.h> //IAR library
- #include <stdint.h>
- //typedef unsigned char uchar;
- typedef unsigned short ushort;
- //typedef unsigned int uint;
-
- typedef short int16_t;
-
-
- //****************************************
- // 定义MPU6050内部地址
- //****************************************
- #define ADDRESS_Write SlaveAddress | 0x00 //
- #define ADDRESS_Read SlaveAddress | 0x01 //
-
-
-
- #define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用)
- #define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz)
- #define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz)
- #define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
- #define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:0x00(不自检,2G,5Hz)
-
- #define ACCEL_XOUT_H 0x3B
- #define ACCEL_XOUT_L 0x3C
- #define ACCEL_YOUT_H 0x3D
- #define ACCEL_YOUT_L 0x3E
- #define ACCEL_ZOUT_H 0x3F
- #define ACCEL_ZOUT_L 0x40
-
- #define TEMP_OUT_H 0x41
- #define TEMP_OUT_L 0x42
-
- #define GYRO_XOUT_H 0x43
- #define GYRO_XOUT_L 0x44
- #define GYRO_YOUT_H 0x45
- #define GYRO_YOUT_L 0x46
- #define GYRO_ZOUT_H 0x47
- #define GYRO_ZOUT_L 0x48
-
-
-
- #define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读)
- //#define SlaveAddress //IIC写入时的地址字节数据,+1为读取
- #define MPU6050_ADDRESS_AD0_LOW 0x68 // address pin low (GND), default for InvenSense evaluation board
- #define MPU6050_ADDRESS_AD0_HIGH 0x69 // address pin high (VCC)
- #define SlaveAddress (MPU6050_ADDRESS_AD0_HIGH<<1)
-
- void mpu6050_init(void);
- void mpu6050_getaccel(int16_t *x, int16_t *y, int16_t *z); //获取寄存器中三轴加速度的值
- void mpu6050_verify(int16_t *x, int16_t *y, int16_t *z);
- #endif
- mpu6050.c文件内容如下:
-
- #include"mpu6050.h"
- #include "i2c.h"
- #include "usart.h"
-
- void mpu6050_init(void) //STM32F051K8通过I2C初始化mpu6050
- {
- uint8_t temp ;
-
- temp = 0x00;
- HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, PWR_MGMT_1, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10);
- /*函数功能,向mpu6050的相关寄存器中写入数据。参数一:使用的是哪一个I2C,参数二:
- mpu6050的地址(7位)和读写操作标志位(1位),参数三:写到mpu6050内部的哪个寄存器,参数四:要写
- 的寄存器是多少位(宽度)的,参数五:写入寄存器的值,参数六:写多少个数据,参数七:设置超时*/
-
- temp = 0x07;
- HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, SMPLRT_DIV, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10);
-
- temp = 0x06;
- HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, CONFIG, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10);
-
- temp = 0x18;
- HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, GYRO_CONFIG, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10);
-
- temp = 0x00;
- HAL_I2C_Mem_Write(&hi2c1, ADDRESS_Write, ACCEL_CONFIG, I2C_MEMADD_SIZE_8BIT, &temp, 1, 0x10);
-
- }
-
-
- void mpu6050_getaccel(int16_t *x, int16_t *y, int16_t *z) //获取寄存器中三轴加速度的值
- {
- uint8_t value[2];
-
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_XOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10);
- /*函数功能:读取mpu6050内部寄存器的值。参数一:使用的是哪一个I2C,参数二:
- mpu6050的地址(7位)和读写操作标志位(1位),参数三:要读取mpu6050内部哪一个寄存器的值,参数
- 四:要读的寄存器是多少位(宽度)的,参数五:存放读取的数值的地址,参数六:读多少个数据,参数七:设
- 置超时*/ //获取x轴加速度值的低八位
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_XOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10);
- //获取x轴加速度值的高八位
- *x = (value[1] << 8) + value[0];
-
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_YOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10);
- //获取y轴加速度值的低八位
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_YOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10);
- //获取y轴加速度值的高八位
- *y = (value[1] << 8) + value[0];
-
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_ZOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10);
- //获取z轴加速度值的低八位
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, ACCEL_ZOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10);
- //获取z轴加速度值的高八位
- *z = (value[1] << 8) + value[0];
-
- printf("acce value: %d %d %d\n",*x,*y,*z);
-
- }

- #include "mpu6050.h"
-
- int fputc(int ch,FILE *f){
- while((USART1->ISR&(1<<7)) == 0);
- USART1->TDR=(uint8_t)ch;
- return ch;
- }
main函数中初始化mpu6050

- #include "mpu6050.h"
-
- int fputc(int ch,FILE *f){
- while((USART1->ISR&(1<<7)) == 0);
- USART1->TDR=(uint8_t)ch;
- return ch;
- }
每隔一秒打印一次mpu6050三轴加速度的值:

- int16_t x, y, z;
- mpu6050_getaccel(&x, &y, &z);//获取并打印mpu6050三轴加速度的值
- HAL_Delay(1000);
测试结果:

另外可实现读取并打印mpu6050三轴加速度的值(同三轴加速度的值获取和打印方法相同):

- void mpu6050_verify(int16_t *x, int16_t *y, int16_t *z)//获取寄存器中三轴角速度的值
- {
- uint8_t value[2];
-
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, GYRO_XOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10);
- /*函数功能:读取mpu6050内部寄存器的值。参数一:使用的是哪一个I2C,参数二:mpu6050的地址
- (7位)和读写操作标志位(1位),参数三:要读取mpu6050内部哪一个寄存器的值,参数四:要读的寄存器是多
- 少位(宽度)的,参数五:存放读取的数值的地址,参数六:读多少个数据,参数七:设置超时*/
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, GYRO_XOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10);
- *x = (value[1] << 8) + value[0];
-
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, GYRO_YOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10);
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, GYRO_YOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10);
- *y = (value[1] << 8) + value[0];
-
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, GYRO_ZOUT_L,I2C_MEMADD_SIZE_8BIT, &value[0], 1,0x10);
- HAL_I2C_Mem_Read(&hi2c1, ADDRESS_Read, GYRO_ZOUT_H,I2C_MEMADD_SIZE_8BIT, &value[1], 1,0x10);
- *z = (value[1] << 8) + value[0];
-
- printf("verify value: %d %d %d\n",*x,*y,*z);
- }
测试结果:
|



 微信公众号
微信公众号
 手机版
手机版








